自动炮台¶
简介¶
本项目是改装狄仁杰小车平台制作的自动寻找并射击靶子的炮台。通过安装在炮台前端的MU识别靶子,精确定位其坐标,反馈控制水弹枪射击。
自动炮台组成¶
水弹发射器
舵机云台
MU3视觉传感器
掌控板+盘古斧
聚合物锂电池 + 18650动力锂电池供电
改装可被识别的靶子
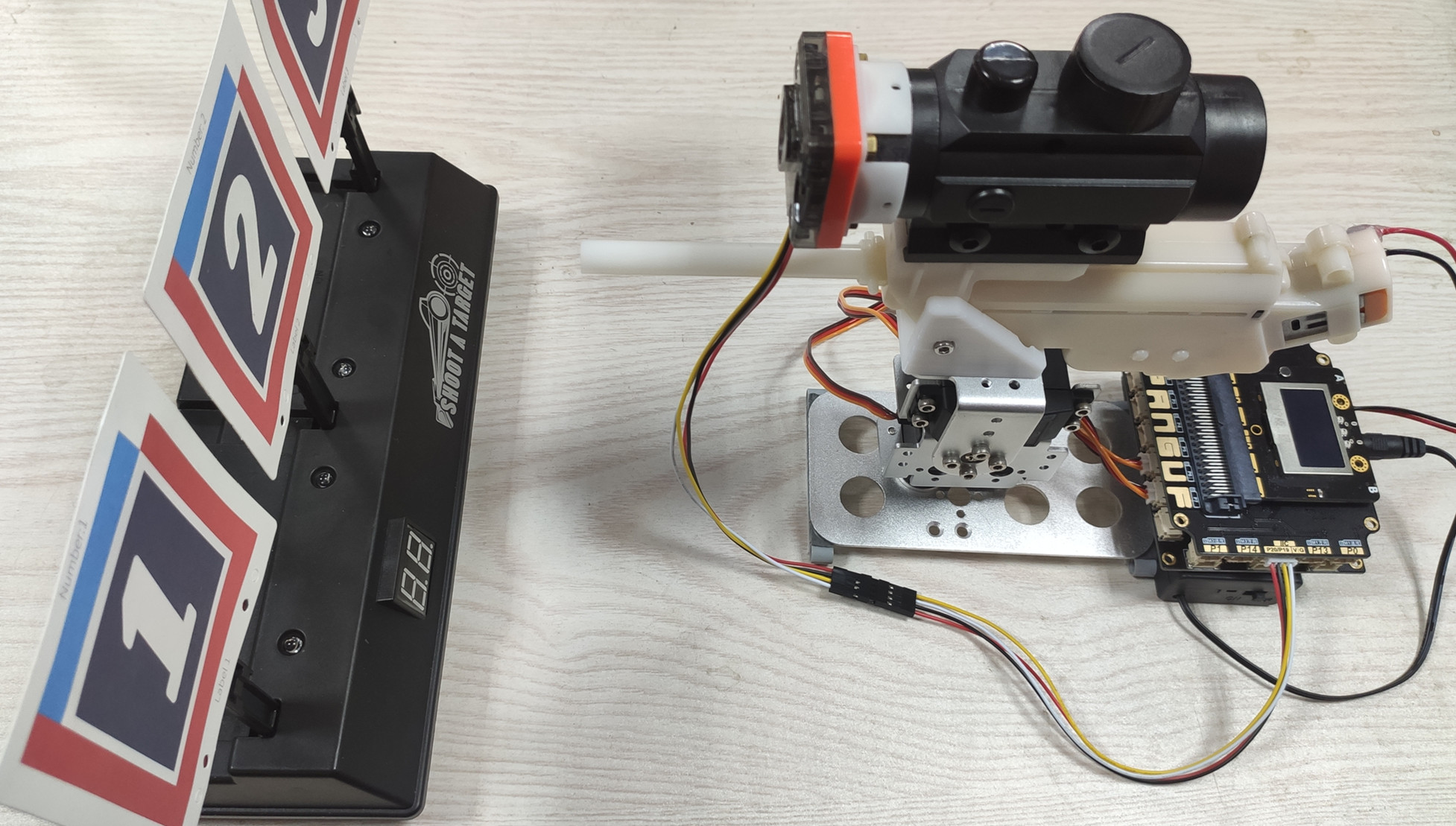
这个就是我的自动炮台,采用MoonBot的金属钣金制作舵机云台,实现双舵机控制炮台两个自由度的运动。 额外加了一个固定水弹枪体的3D打印支架和固定用的钣金底座。将MU可识别的数字卡片贴在原本的电动靶上,同时还增大了目标更容易射中 囧。。。
程序解析¶
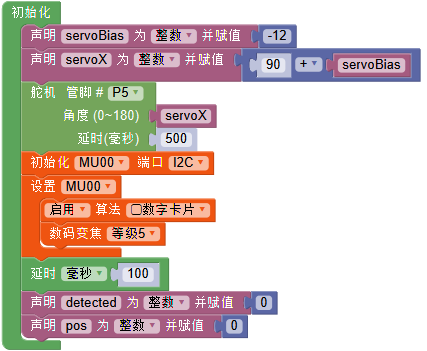
初始设置程序
初始化中对将要用到的外设进行设置,包括舵机和MU。
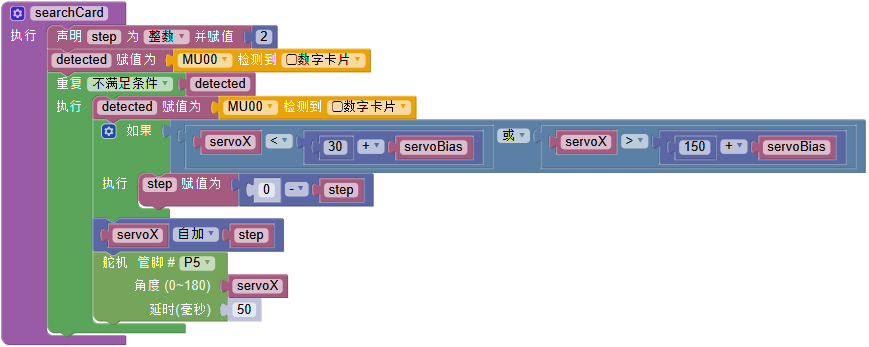
寻找卡片函数
寻找卡片采用舵机左右移动的方式,配合上下微调,找寻180度视角范围内的卡片。
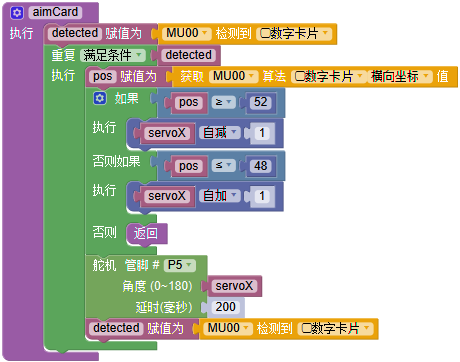
对准卡片函数
当寻找到卡片时,进入对准卡片的程序。通过舵机移动修正炮和卡片之间的距离。
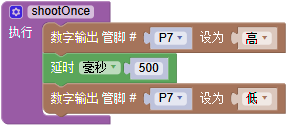
发射函数
比较简单,通过控制P脚直接输出高电平发射,约0.5秒时间,可以打出约3发水弹,如果击倒比较容易则可以时间更短些。
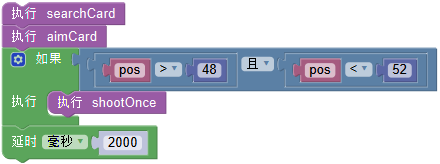
循环程序
将以上函数组合后就是循环程序的内容。
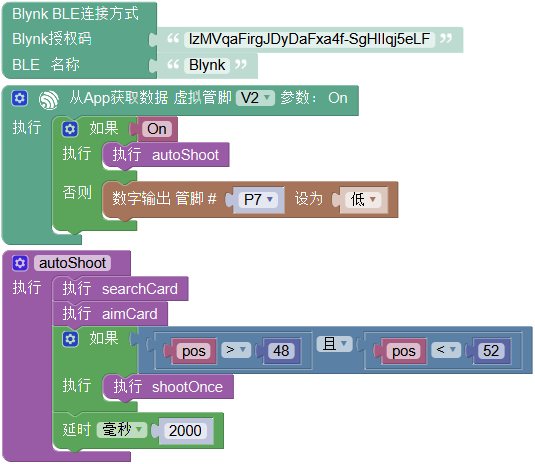
远程控制程序
另外可以加入Blynk远程开启炮台的程序,将循环程序作为子程序整体放入Blynk中。按键按下则触发循环程序执行自动发射。
实战演习¶
程序开始,舵机复位至正中。主方向为左右方向,检测并扫描。在遇到数字卡片时跳出寻找卡片,进入对准卡片程序。 在确定视觉模块对准坐标48至52位置时射击,两秒后再次进入扫描。
如果加入远程控制程序,则在blynk端按下按键后开启整段自动射击程序。
视频