综合运用教程¶
交通控制器¶
交通控制器中micro:bit主控和扩展板作为主控,电池作为供电,舵机和交通灯作为输出, 是舵机、交通灯、GPIO的综运用示例。
下载本页示例:综合运用程序
程序说明:
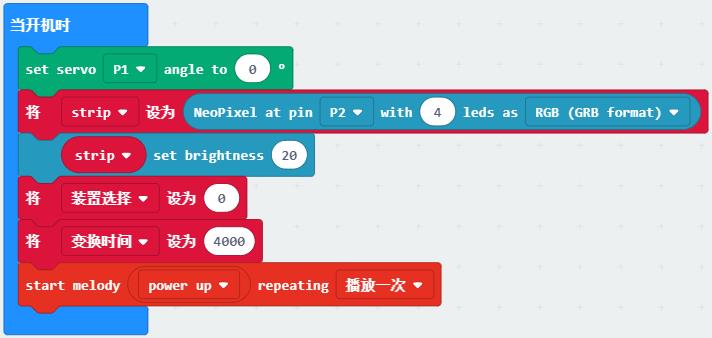
1.当开机时,设定舵机连接口P1和交通灯连接口P2,初始化用到的变量。
2.无线循环主程序中,检测变量“装置选择”的数值,启用相应功能。

3.通过按键中断对“装置选择”进行修改,且约束在0-3之间。

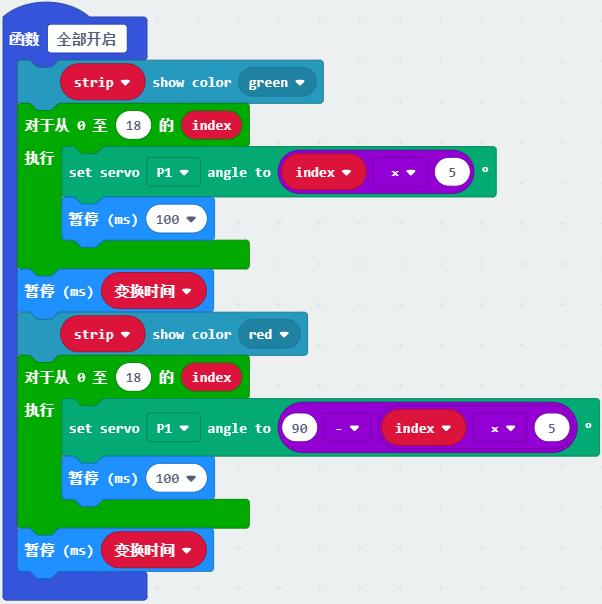
4.各个功能函数,点亮红绿灯,转动舵机,全部开启和全部关闭,可以被主程序调用。



道路内自动驾驶¶
该应用是用MU识别白色道路和放置在地上的交通卡片引导小车自动驾驶。调节视觉传感器朝向地面。可用模块化地图块拼成道路地图来形成自动驾驶场景。
程序说明:
1.当开机时,设定车速和颜色的坐标,初始化视觉传感器,调整摄像头相关的参数。

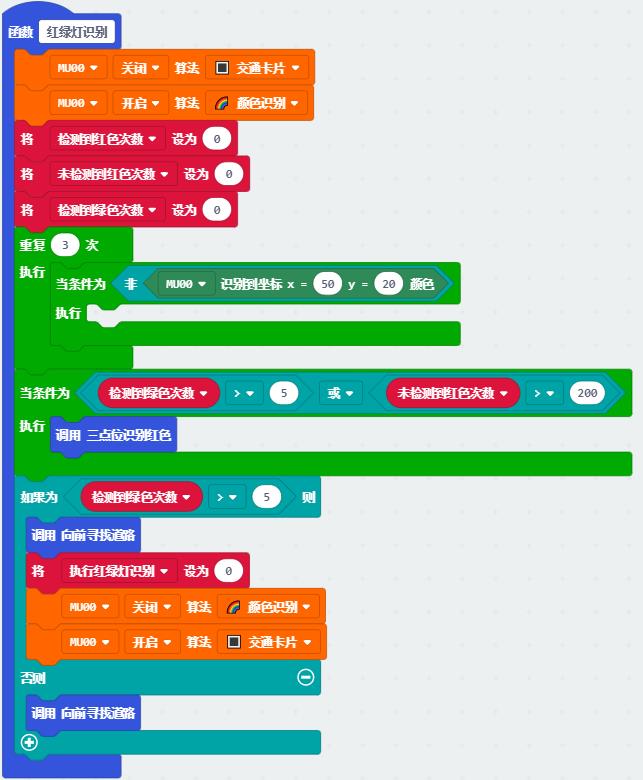
2.主程序的第一部分,视觉传感器检测地上是否有交通卡片,并根据卡片类型控制车的动作。

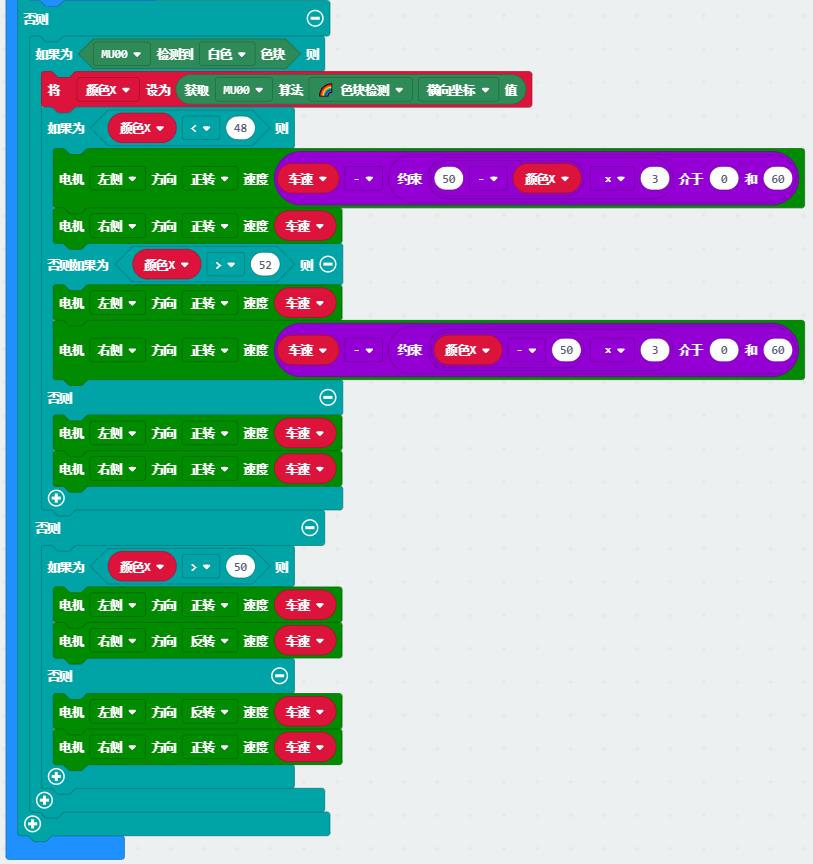
3.主程序的第二部分,当地上没有交通卡片时,检测白色道路的范围,控制小车前进或转弯,使小车始终在白色道路内。