MoonBot 指南¶
介绍¶
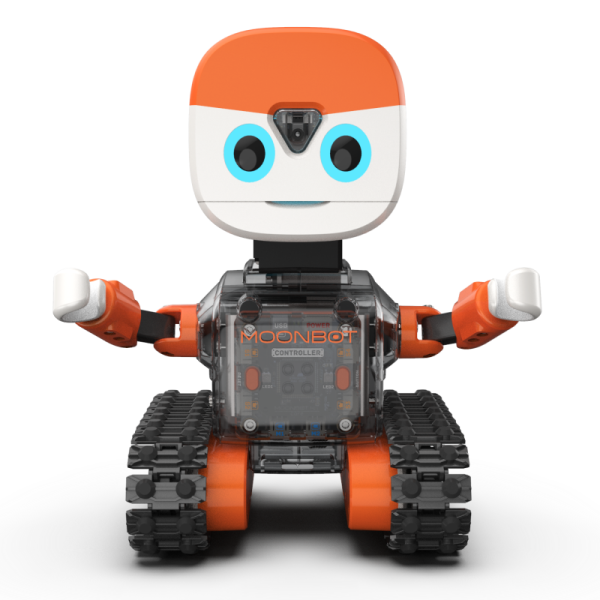
MoonBot是一台具有丰富的传感和交互的半人形机器人。主体由钣金骨架配合塑料外壳搭建而成,使用履带底盘整体移动,头部、手部则使用舵机实现转动。 通过触摸、视觉、方位的反馈,眼睛和扬声器等都可作出交互。
MoonBot可用于学习接待、巡逻等服务型机器人应用。
示例程序¶
下载MoonBot米思奇示例程序
摇摆身体¶
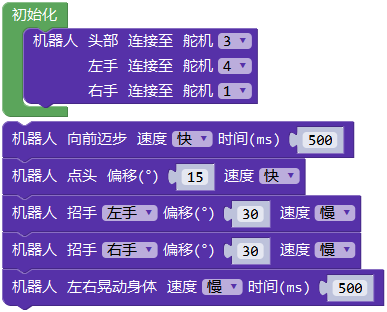
MoonBot的手部和脖子有舵机,履带底盘用电机模块驱动,可通过编程实现相应的动作。通过一个简单的示例让MoonBot活动一下。
程序介绍:初始化设定头和手部的舵机端口,循环程序里一次使用机器人动作块,让机器人左手右手一个慢动作。
跟随人体¶
MoonBot可以靠视觉来识别人体,并通过底盘和头部的运动跟随人体。
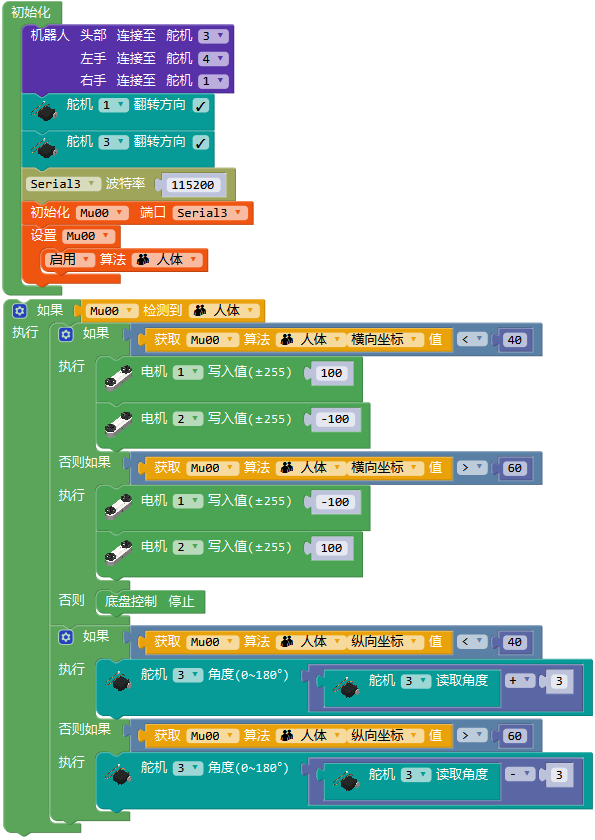
程序介绍:初始化连接舵机,根据实际转动方向调整舵机的方向,设置连接在串口3的视觉传感器,启用人体识别算法。 循环程序中,当检测到人体时,根据人体的横向坐标判断底盘的转动方向,再根据人体的纵向坐标判断脖子舵机的转动方向。
实验现象:烧录完成程序后打开MoonBot放在桌面上,站在机器人眼前,当视觉闪红灯时未检测到,当视觉闪蓝灯时则检测到人体。 人上下左右移动时机器人也会移动和转动脖子,保持脸始终朝向人体。