MoonMech 指南¶
介绍¶
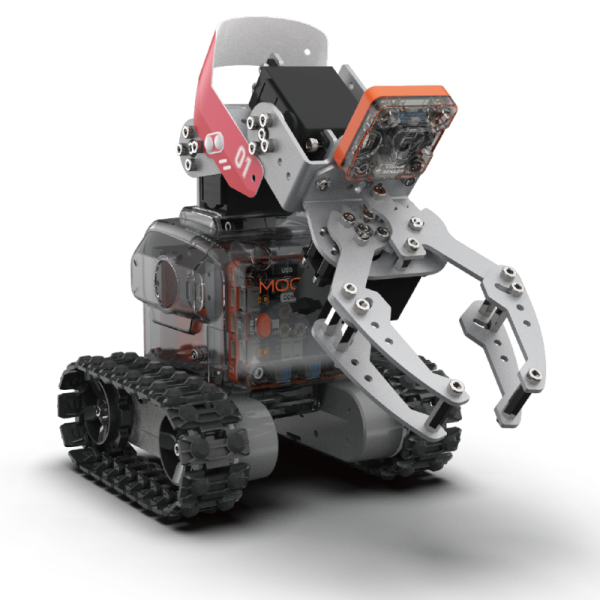
MoonMech是一台可移动的机械臂。底盘和人型类似,由塑料外壳包裹钣金骨架搭建而成。整体移动依靠底部履带底盘,机械臂的角度和调节则依靠两个舵机。前置机械爪配合视觉反馈可以夹持各种物体。
MoonMech可以用于学习物料搬运、投篮等工程和竞技类应用。
MoonMech是一台可移动的机械臂。底盘和人型类似,由塑料外壳包裹钣金骨架搭建而成。整体移动依靠底部履带底盘,机械臂的角度和调节则依靠两个舵机。前置机械爪配合视觉反馈可以夹持各种物体。
MoonMech可以用于学习物料搬运、投篮等工程和竞技类应用。