MU Vision Sensor 3 开发教程
MoonBot Kit 开发教程
MU无人驾驶教育套件
技术支持
版权与许可
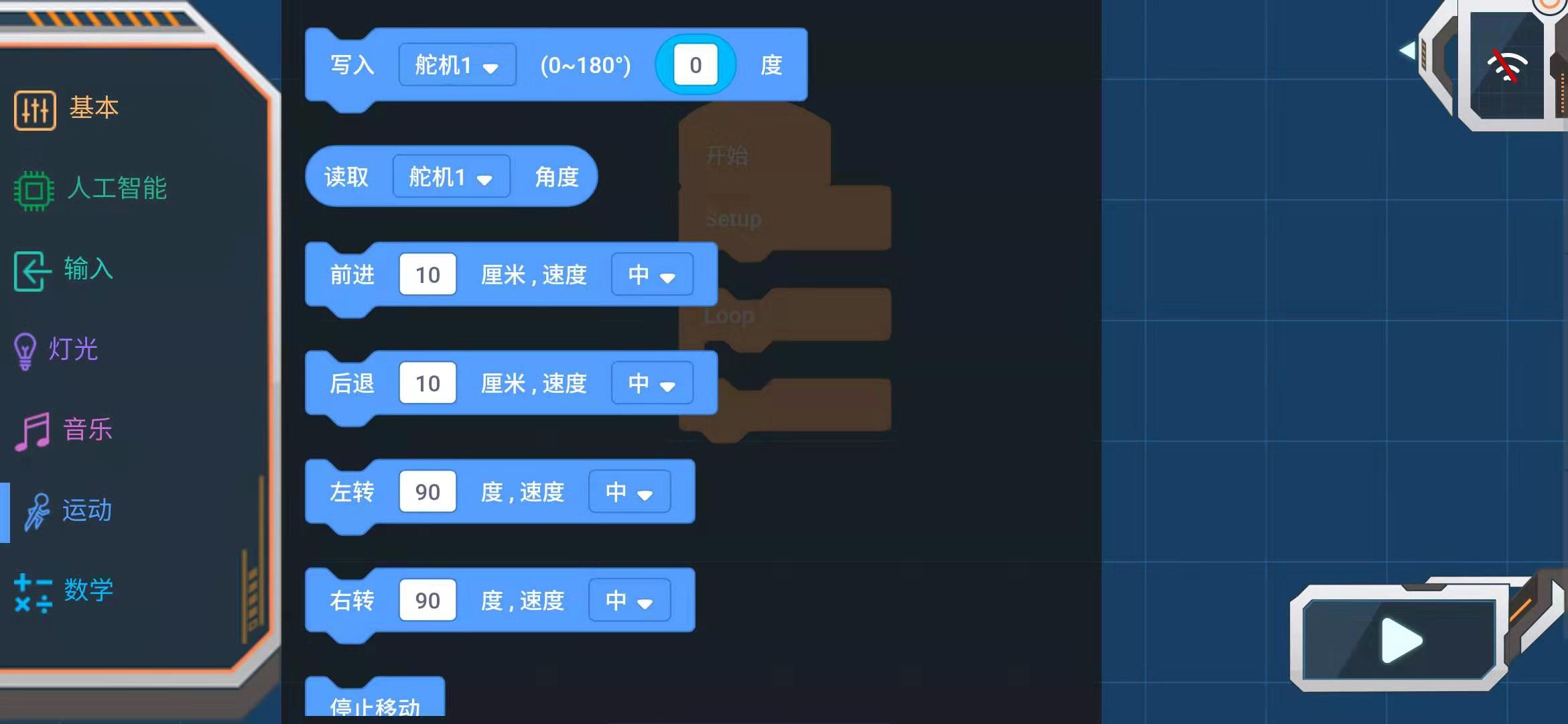
舵机口:舵机1~舵机4
角度:0~180°
读取指定舵机角度
参数:舵机1~4
以指定档位速度前进设置好的距离
执行距离:0~999cm
速度参数:很快、快、中、慢、很慢
以指定档位速度后退设置好的距离
以指定档位速度左转设置好的角度
执行距离:0~999°
以指定档位速度右转设置好的角度
向电机写入一定的转速(-100~+100转/分)
参数:电机1、电机2
通过校准直行偏移使之不会往某一方向偏移
参数:0~200,>100向右校准,<100向左校准
校准外部干扰引起的直行距离不准确的情况
参数:>100增大距离,<100减少距离
校准外部干扰引起的转弯角度不到位的情况
参数:>100增大转弯角度,<100减少转弯角度
通过舵机校准模块校准生产安装上的角度误差
增加/减少(-90~+90°)