视觉模块¶

参数¶
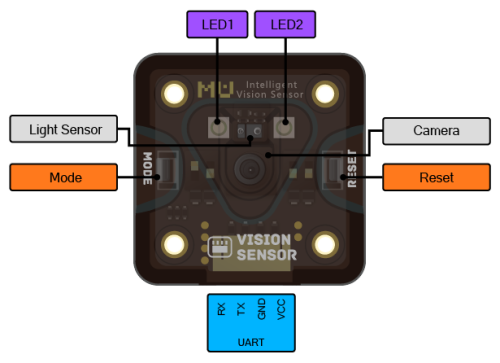
尺寸:37 x 37 x 15 mm
主控芯片:ESP32
摄像头:OV7725
视角:85°
光线传感器:APDS9960
板载资源:按键、LED指示灯
连接方式:UART、wifi
接口:PH2.0 4P
接口图¶
使用示例¶
串口开发¶
视觉模块可和主控连接,通过主控编程使用指令控制决定视觉模块的识别功能,并通过串口向主控传输数据。
硬件连接:将视觉模块连至主控P9口,作为UART3(Serial3)串口设备运行。
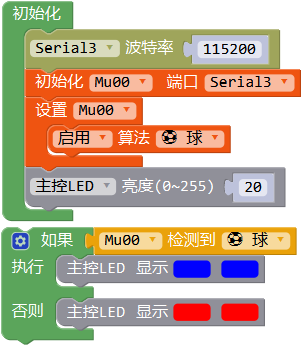
程序介绍:在初始化中开启主控和视觉模块间串口Serial3,波特率默认115200,初始化视觉模块至Serial3,启用球检测算法。 循环程序中,将主控的亮灯状态配置为和视觉模块的灯相同,即检测到球亮蓝灯,未检测到球亮红灯。
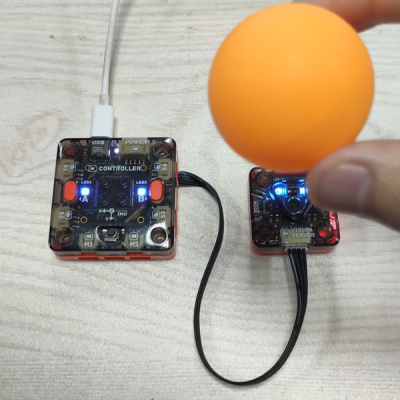
实验现象:先按视觉模块的RESET键初始化视觉模块,板载两个LED灯会常亮进入等待指令状态,然后初始化主控,主控的初始化程序就向视觉模块发送指令, 此时视觉模块进入检测球状态,两个灯闪红色,此时主控进入循环接收状态。当检测到球时,主控和视觉模块的LED都亮蓝色。
实物图:
注意MoonBot视觉模块和MU视觉传感器的区别,视觉模块默认和主控采用串口连接,使用Mixly或Arduino进行开发,且独有wifi连接MU Bot App的功能,初始化程序参考以上示例。
该程序较为简单,主要为了展示视觉模块的连接和程序初始化。更多编程块和示例程序可参考
光线传感器¶
在最新版本视觉模块的固件中,加入了板载光线传感器的控制功能。该光线传感器为红外传感器的点阵,可以测得环境光强度,或用红外测距判断前方物体的移动信息,即可以识别挥动手势。 以下示例展示视觉模块的手势识别功能。
硬件连接:同上
程序介绍:初始化中开启串口Serial和Serial3,Serial用于主控和PC通讯,Serial3用于主控和视觉模块通讯。启用光线传感器的手势检测功能。 循环程序中,循环检测手势,若识别到手势,则判断具体的手势类型并通过串口发送至PC。
实验现象:本示例未使用视觉算法,所以初始化视觉模块后板载LED未开启。打开Mixly的串口监视器,当手在视觉模块前约20cm处划过时,串口打印手划过的方向,就是此时的挥动手势。
