主控模块¶
使用示例¶
主控LED和按键示例¶
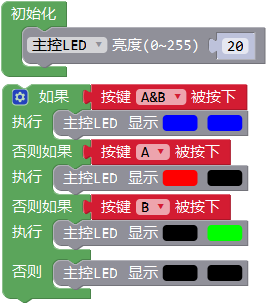
按键和LED灯是最基础的输入和输出设备,可以用于其他设备的功能调试。首先介绍这两项,之后的调试会更方便。 以下示例通过主控模块板载的2个可编程按键控制板载的2个RGB彩灯。
程序介绍:循环检测按键A和按键B的状态,当A被按下时LED1亮红色,当按键B被按下时LED2亮绿色,同时按下则都亮蓝色,无按键按下时关闭LED。
实物图:

主控蜂鸣器示例¶
该程序介绍主控蜂鸣器的编程方法,用两种方式让蜂鸣器发出警报声。
程序介绍:设置蜂鸣器的节拍为BPM 120,即每1拍为0.5秒。蜂鸣器可以直接播放已定义的音调,或者直接播放频率,播放频率时需要加上延时,否则会被跳过。 循环播放5次高低警报音后停止播放,结尾添加停止程序块防止循环播放。

主控IMU示例¶
IMU(Inertial Measurement Unit)是指惯性测量单元,含有陀螺仪、加速度计、指南针等一种或多种传感器,主要用于测量当前姿态,常用于无人机、机器人等设备。 主控模块的IMU含有加速度计和指南针,并带有温度补偿,可以通过这些传感器反馈知道机器人当前是否有翻倒、跌落、震动等状态。以下示例简单介绍主控的IMU使用方法。
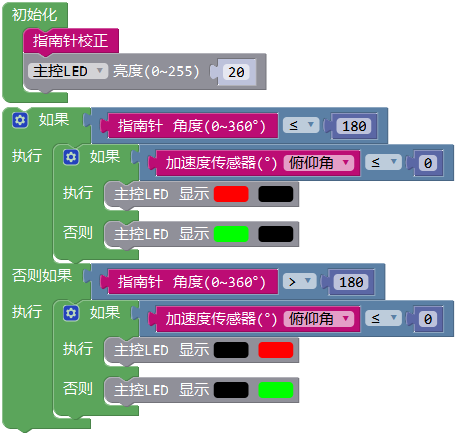
程序介绍:初始化时校正指南针并调整主控灯光颜色,循环程序通过判断指南针和加速度计的角度定义4个方位,通过灯光颜色来指示方位。
实验现象:主控复位后在空中画∞来校正指南针,当LED灯闪烁时完成校正,此时将主控平放,指南针180度为正南方向,向左/右旋转则左/右边灯亮,俯/仰则亮绿/红色。