舵机模块¶
使用示例¶
舵机校正¶
舵机转动范围为0~180度,顺时针方向为角度增大,初始角度设定为90度,舵机盘上带有一个向前的标记。
舵机为角度控制装置,通过内部电位器反馈来获得当前角度。 由于电位器角度和舵机盘安装等影响,舵机初始角度可能会有较小的偏差,通常小于10度,可通过程序来校正舵机的初始角度。
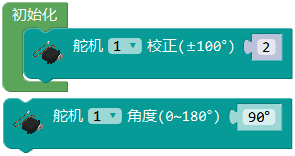
程序介绍:初始化设定舵机角度校正,将舵机转至90度,观察实际舵机盘角度是否有偏差,调整校正角度值确定该舵机的校正角度。 注意校正角度值为舵机的初始值而不是端口S1的初始值。如果将该舵机换端口则需要将程序中也改为对应端口。
舵机转动¶
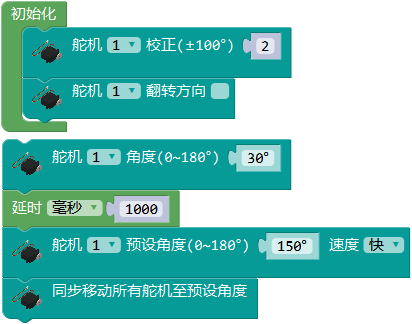
舵机转动有两种方式,设定转至角度和时间,或者预设角度和速度后同步移动。前一种方式通常用于单舵机转动,后一种方式用于多个舵机同时转动。 通过以下示例展示两种转动方式。
程序介绍:初始化设定舵机校正角度和转动方向。循环程序先使用舵机角度和延时控制舵机转至30度,再使用同步移动方式控制舵机快速转至150度。
实物图:
