APP Programming Block_Input¶
Input¶
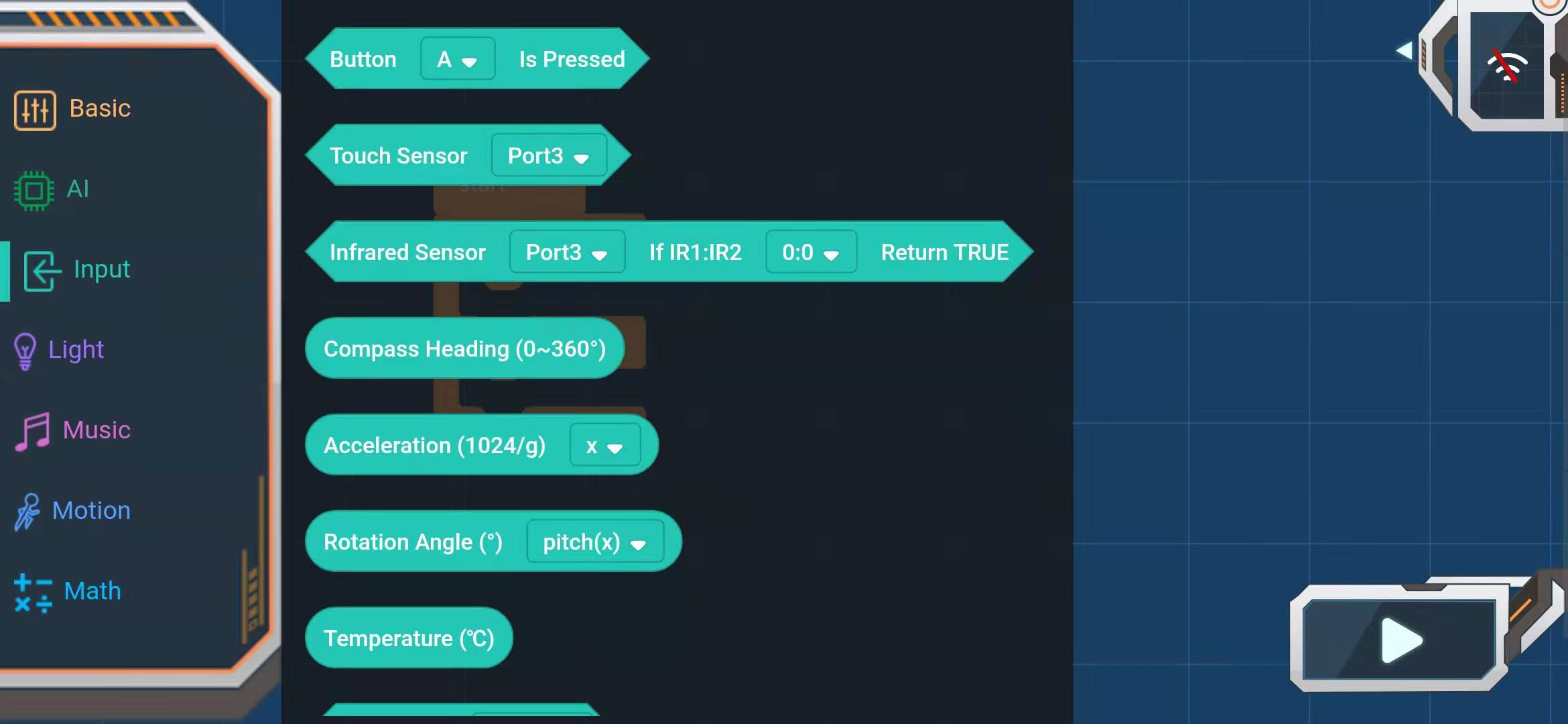
Initialize the infrared sensor port and read infrared sensors¶

Port Parameter:Port3,Port5,Port7,Port8
infrared sensor IR1:IR2 Parameter:0:0,0:1,1:0,1:1
0 means undetected , 1 means detected
Read acceleration value(1024/g)¶
Parameter:X direction, y direction, Z direction, strength value
Return: Acceleration value
Reading rotation angle(°)¶

Parameters: pitch (x), roll (y), read the main control tilt angle
Return: Angle value(-180°~+180°)
Read IMU actions¶
Parameters: vibration, free falling, X-axis up, X-axis down, Y-axis up, Y-axis down, Z-axis up, Z-axis down, 3g, 6g, 8g
Calibration compass¶
Compass calibration module, the main control in calibration needs to be flipped in the shape of ”∞“