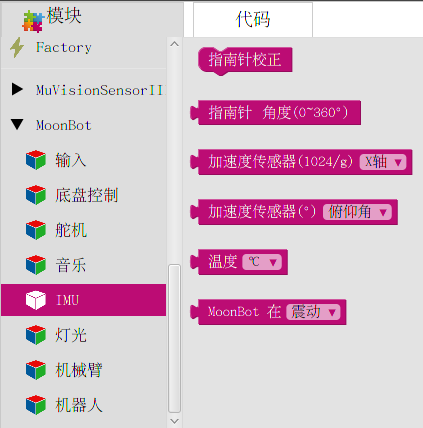
IMU
IMU 包含了 MoonBot Kit 主控模块 板载的三轴加速度,三轴磁力计和温度传感器的驱动。
通过调用这些模块,您可以获取 MoonBot Kit 主控当前方向、倾斜角度和状态等。
指南针校正
- 描述
校准指南针,校准时主控需以”∞“字形翻转。
具体可参考手机指南针校准方法。
获取指南针角度

- 描述
读取指南针 Y 轴当前方向与正北方向的夹角。
- 返回
-
获取加速度值

- 描述
读取给定轴的加速度模拟量。
- 参数
- 方向轴
-
- 返回
-
获取加速度角度

- 描述
获取当前主控的倾斜角度
- 参数
- 夹角类型
-
- 返回
-
读取温度

- 描述
读取当前温度值
- 参数
- 温度单位
℃ :返回值以摄氏度为单位
℉ :返回值以华氏度为单位
- 返回
-
读取当前状态

- 描述
读取当前主控状态。
- 参数
- 状态
震动 :主控是否处于震动状态
自由落体 :主控是否处于自由落体状态
- 返回
true :主控当前处于该状态
false :触控当前不处于该状态