机器人
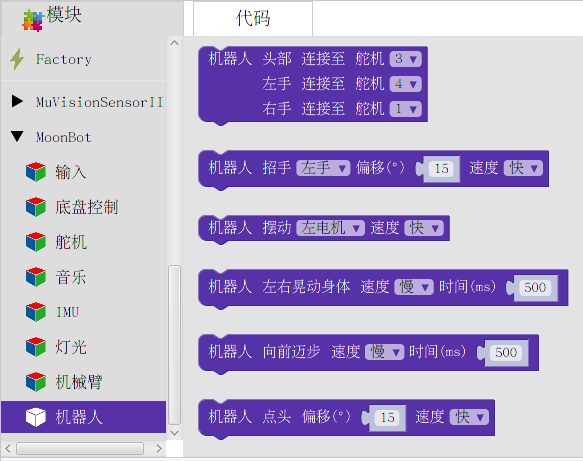
机器人 包含了 MoonBot 机器人 中集成的动作。
通过调用这些模块,您可以控制机器人执行点头、招手等动作。
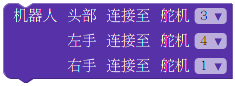
初始化
- 描述
初始化 MoonBot 机器人各个端口。
- 参数
- 头部舵机
-
- 左手舵机
-
- 右手舵机
-
招手

- 描述
驱动机器人的手臂进行招手。
- 参数
- 手臂
-
- 偏移
-
- 速度
-
摆动

- 描述
同时摆动机器人的头和脚。
- 参数
- 电机
-
- 速度
-
左右晃动身体

- 描述
控制机器人电机左右晃动。
- 参数
- 速度
-
- 时间
-
前进迈步

- 描述
控制机器人向前迈出一步。
- 参数
- 速度
-
- 时间
-
点头

- 描述
控制机器人点一次头。
- 参数
- 偏移
-
- 速度
-