机械臂¶
机械臂 包含了 机械臂 形态下的集成动作。
通过调用这些模块,您可以轻松控制机械臂去抓球等。
初始化¶
- 描述
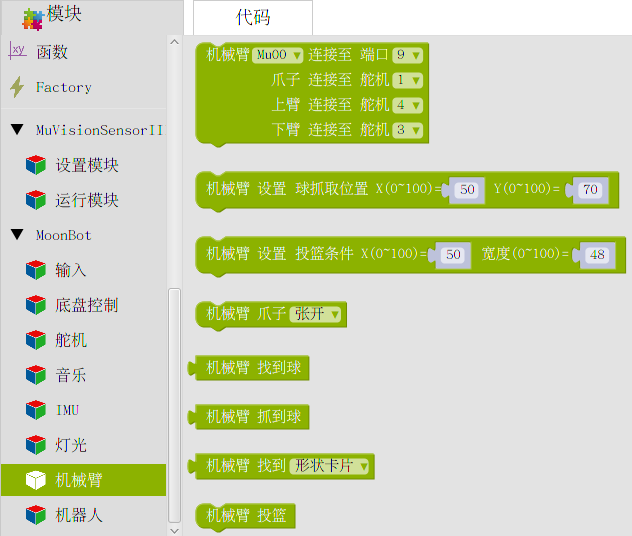
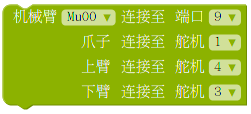
初始化 MoonMech 机械臂端口。
- 参数
- MU 地址
MU00:MU 地址0x60MU01:MU 地址0x61MU10:MU 地址0x62MU11:MU 地址0x63
- MU 端口
2,7,9
- 机械爪舵机端口
1~4
- 上臂舵机端口
1~4
- 下臂舵机端口
1~4
设置抓球位置¶

- 描述
设置 MoonMech 机械臂抓球位置,可以通过调整识别球的 X Y 值来让机械爪抓到球。
当球处于给定的 X Y 值范围内时,机械爪会闭合抓取球。
- 参数
- X
0~100:机械爪抓球时的水平位置,可通过修改此值调整机械爪抓球时相对于球的水平位置
- Y
0~100:机械爪抓球时的垂直位置,可通过修改此值调整机械爪抓球时的垂直高度
设置投篮条件¶

- 描述
设置 MoonMech 机械爪投篮的条件,可以通过调整识别到卡片的水平位置 X 和宽度来让机械臂准确的投进篮筐。
当卡片处于给定的 X 宽度值范围内时,机械臂会触发投篮动作进行投篮。
- 参数
- X
0~100:机械爪投篮时,相对于卡片横向坐标 X 的水平位置,可通过修改此值调整机械爪相对于卡片的水平位置
- 宽度
0~100:机械爪投篮时卡片的大小,可通过修改此值调 MoonMECH 机械臂投篮时与篮筐(卡片)的距离。
爪子动作¶
- 描述
设置机械爪动作。可通过此模块控制机械爪水平平移或上下平移。
- 参数
- 动作
张开:将机械爪张开(110°)关闭:将机械爪关闭(90°)前进:机械爪水平前进一个单位后退:机械爪水平后退一个单位向上:机械爪垂直向上一个单位向下:机械爪垂直向下一个单位