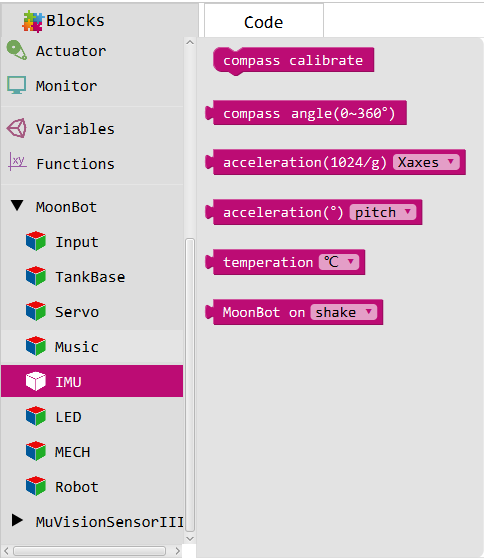
IMU¶
IMU include MoonBot Kit Controller Module three-axis acceleration , drive of three-axis magnetometer and temperature sensor on board.
By calling these modules, you can get MoonBot Kit master control of current direction, tilt angle and state, etc.
Compass calibration¶
- Introduction
When calibrating the compass, the master control needs to flip in the shape of ”∞“
Acquisition of compass angle¶
- Introduction
Read the angle between the current direction and the northward direction of the compass Y axis.
- Return
0~360°
Acquisition of acceleration value¶

- Introduction
Read the acceleration simulation of a given axis.
- Parameters
- Directional axis
X,Y,Z
- Return
Acceleration analogue
Acquisition of acceleration angle¶

- Introduction
Acquisition the tilt angle of the master control
- Introduction
- Angle type
Elevation angle:The angle between Y axis and horizontal plane in the master control coordinates. When the main control tilts upward, the pitch angle is positive and vice versa.Roll angle:The angle between X axis and horizontal plane in the master control coordinates. When the main control tilts to the right, the roll angle is positive and vice versa.
- Return
±180°
Read Temperature¶
- Introduction
Read the current temperature
- Parameters
- Unit of temperature
℃:Celsius degree℉:Fahrenheit degree
- Return
Temperature value
Read the current status¶
- Introduction
Read the current master control state.
- Parameters
- state
shock:Whether the master control is in vibration state or notFree fall:Whether the master control is in free falling state
- Return
true:The master control is currently in this statefalse:The master control is not currently in this state