Chassis Control¶
Chassis Control include drives MoonBot Kit Motor Module and driving of Encoder in Motor.
By calling these modules, the motor chassis can move.
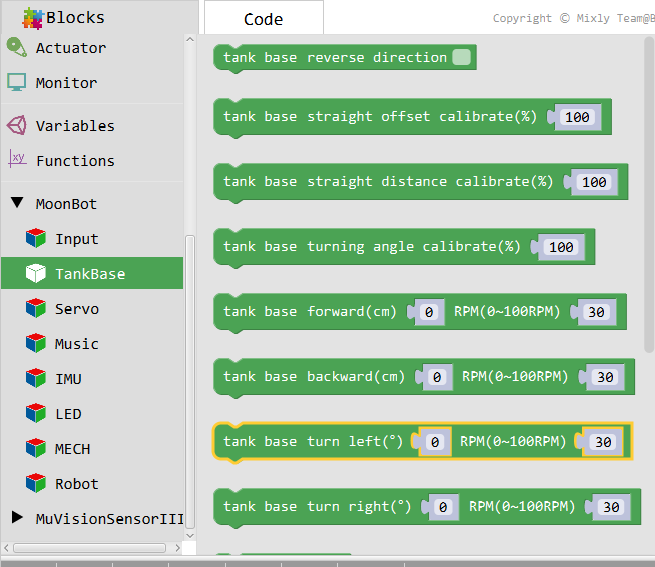
Reversal direction¶

- Introduction
The direction of motion of the flip motor.
- Parameters
- Reversal direction
true:Reversal directionfalse:Default direction
Straight-line offset correction¶

- Introduction
Because of friction, installation deviation and other disturbances, the chassis will be offset in a certain direction when it goes straight.
Direct migration caused by external disturbance can be corrected by `direct migration correction `module.
- Introduction
- Straight-line offset correction(%)
0~200:>100 Correction to the right,<100 Correction to the left
Straight Distance Correction¶

- Introduction
Because of friction, installation deviation and other disturbances, chassis traveling a certain distance will have the situation of inadequate direct travel.
Through the `direct distance correction `module, the situation of the out-of-place direct distance caused by external disturbance can be corrected.
Before correcting the straight-line distance, it is suggested that straight-line migration correction’be carried out first.`
- Introduction
- Straight Distance Correction(%)
0~+∞:>100 Increased direct distance,<100 Straight distance decreases
Turning Angle Correction¶

- Introduction
Because of friction, installation deviation and other disturbances, chassis rotating at a certain angle will have the situation that the turning angle is not in place.
Through the `turning angle correction’module, the situation that the turning angle caused by external disturbance is not in place can be corrected.
Before correcting the turning angle, it is suggested that `straight-line offset correction’ and `straight-line distance correction’ should be carried out first.
- Introduction
- Turning Angle Correction(%)
0~+∞:>100 Increased turning angle,<100 Reduced turning angle
Forward¶

- Introduction
Control the chassis to move forward at a given speed until it stops at a given distance.
The module ** calls the encoder module ** to ensure that the corresponding encoder has been connected to the corresponding port
- Parameters
- Forward Distance(cm)
Distance value:Given straight distance,Unit: cm
- speed
Speed Value:Given Speed of Direct Motor,Unit: RPM
Backward¶

- Introduction
The control chassis runs backwards at a given speed until it stops at a given distance.
The module ** calls the encoder module ** to ensure that the corresponding encoder has been connected to the corresponding port.
- Parameters
- Backward distance(cm)
Distance value:Given straight distance,Unit: cm
- speed
Speed Value:Given Speed of Direct Motor,Unit: RPM
Left turn¶

- Introduction
Control the chassis to turn left at a given speed to a given angle and stop.
The module ** calls the encoder module ** to ensure that the corresponding encoder has been connected to the corresponding port.
- Parameters
- Left turn angle(°)
Angle value:Given a straight angle,Unit: °
- speed
Speed Value:Given Speed of Direct Motor,Unit: RPM
Right turn¶

- Introduction
Control the chassis to turn right at a given speed to a given angle and stop.
The module ** calls the encoder module ** to ensure that the corresponding encoder has been connected to the corresponding port.
- Parameters
- Right turn angle(°)
Angle value:Given a straight angle,Unit: °
- speed
Speed Value:Given Speed of Direct Motor,Unit: RPM
Motor write-in value¶
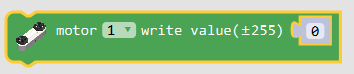
- Introduction
Write the analog to the motor at the corresponding port.
- Parameters
- Motor port
1:Motor port 12:Motor port 2
- value
±255:Write the value of the analog,>0 Turn Forward,<0 Turn back,=0 Stop turning
Reading motor value¶
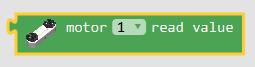
- Introduction
Read the analog value of the corresponding motor port.
- Parameters
- Motor port
1:Motor port 12:Motor port 2
- Return
value:Value of motor analogue
Writing Speed of Motor¶
- Introduction
Write the speed to the motor at the corresponding port.
The module ** calls the encoder module ** to ensure that the corresponding encoder has been connected to the corresponding port.
- Parameters
- Motor port
1:Motor port 12:Motor port 2
- value
±60:Write the value of the analog,>0 Turn Forward,<0 Turn back,=0 Stop turning,unit:RPM
Reading motor speed¶

- Introduction
Read the speed of the corresponding motor port.
- Parameters
- Motor port
1:Motor port 12:Motor port 2
- Return
speed:motor speed ,unit:RPM