MoonBot¶
MoonBot include MoonBot robot Integrative Action in Morphology.
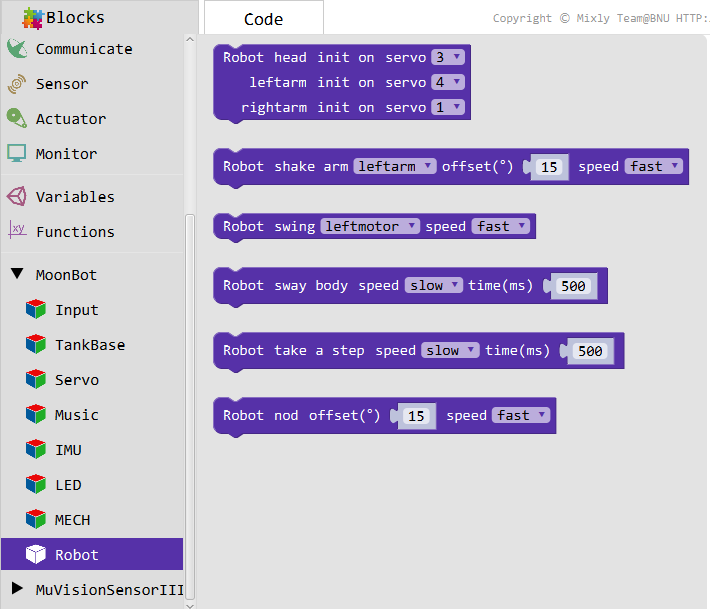
By calling these modules, you can control the robot to perform nodding, waving and other actions.
Initialization¶
- Introduction
Initialize the ports of the MoonBot robot.
- Parameters
- Head steering gear
1~4
- Left-handed steering gear
1~4
- Right-handed steering gear
1~4
Wave¶

- Introduction
The arm that drives the robot waves.
- Parameters
- Arm
Left handRight handBoth hands
- deviation
0~90:Deviation Angle of Up and Down Waves of Robot
- Speed
fastmidslow
Swing¶

- Introduction
The head and foot of the robot are swing at the same time.
- Parameters
- Motor
Left motorRight motorDual motor
- Speed
fastmidslow
Shake your body from side to side¶

- Introduction
Control the robot motor to sway left and right.
- Parameters
- Speed
fastmidslow
- Time
0~+∞:Single shaking time of motor
Step Forward¶

- Introduction
Controlling the robot takes a step forward.
- Parameters
- Speed
fastmidslow
- Time
0~+∞:The longer the motor takes a step forward, the bigger the step is.
Nod¶

- Introduction
The control robot nodded once.
- Parameters
- deviation
0~90°:Nodding range
- Speed
fastmidslow