Mech¶
Mech include mech Integrative Action in Morphology
By calling these modules, you can easily control the manipulator to catch the ball and so on.
Initialization¶
- Introduction
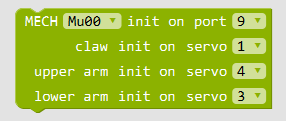
Initialize the MoonMech manipulator port.
- Parameters
- MU adress
MU00:MU address 0x60MU01:MU address 0x61MU10:MU address 0x62MU11:MU address 0x63
- MU Port
2,7,9
- Mech claw Steering engine port
1~4
- Upper arm Steering engine port
1~4
- Lower arm Steering engine port
1~4
Setting the position of catch ball¶

- Introduction
Setting up the position of the MoonMech manipulator to grasp the ball,The mechanical gripper can catch the ball by adjusting the X-Y value of the recognition ball.
When the ball is within the given X-Y value range, the mechanical claw closes to grasp the ball.
- Parameters
- X
0~100:Horizontal position of mechanical claw grip ball,The horizontal position of the mechanical claw relative to the ball can be adjusted by modifying this value.
- Y
0~100:Vertical position of mechanical claw catching ball,The vertical height of the gripper can be adjusted by modifying this value.
Setting Shooting Conditions¶

- Introduction
Setting up the conditions of MoonMech mechanical claw shooting,The horizontal position X and width of the card can be adjusted to allow the manipulator to shoot accurately into the basket.
When the card within the given X-width range, the arm triggers the shooting action to shoot.
- Parameters
- X
0~100:Horizontal position relative to transverse coordinate X of card when shooting with mechanical claw,The horizontal position of the gripper relative to the card can be adjusted by modifying this value.
- Width
0~100:The size of the card when the mechanical claw shoots,The distance between MoonMECH mechanical arm and basket (card) can be adjusted by modifying this value.
Claw movement¶
- Introduction
Set up mechanical claw action. This module can be used to control the horizontal or up-down translation of the mechanical claw.
- Parameters
- action
open:Open the mechanical claw(110°)close:Close the mechanical claw(90°)forward:The mechanical claw advances horizontally in a unit.back:The mechanical claw retreats one unit horizontallyupThe mechanical claw is vertically upward in a unit.down:A vertical downward unit of a mechanical claw.
Find the ball¶
- Introduction
Control MoonMech manipulator to perform ball searching.
- Return
true:Find the ballfalse:No ball was found.
Catch the ball¶
- Introduction
Control MoonMech manipulator to perform catch action.
If the ball manipulator is not found during execution of this block, MoonMech will remain in place and return
false。- Return
true:Catch the ballfalse:No ball was found.
Find the card¶

- Introduction
The MoonMech manipulator is controlled to perform the search basket (card) action.
- Parameters
- card type
shape cardtraffic cardnumber card
- Return
true:Find the given cardfalse:No given card was found
Shoot¶
- Introduction
Control MoonMech manipulator to execute shooting action.
If the ball manipulator is not found during execution of this block, MoonMech will remain in place.